This paper is the result of a collaboration with LIRIS Laboratory members Julie Digne and Raphaëlle Chaine
Abstract
Most surfaces, be it from a fine-art artifact or a mechanical object, are characterized by a strong self-similarity. This property finds its source in the natural structures of objects but also in the fabrication processes: regularity of the sculpting technique, or machine tool. In this paper, we propose to exploit the self-similarity of the underlying shapes for compressing point cloud surfaces which can contain millions of points at a very high precision. Our approach locally resamples the point cloud in order to highlight the self-similarity of the shape, while remaining consistent with the original shape and the scanner precision. It then uses this self-similarity to create an ad hoc dictionary on which the local neighborhoods will be sparsely represented, thus allowing for a light-weight representation of the total surface. We demonstrate the validity of our approach on several point clouds from fine- arts and mechanical objects, as well as a urban scene. In addition, we show that our approach also achieves a filtering of noise whose magnitude is smaller than the scanner precision.

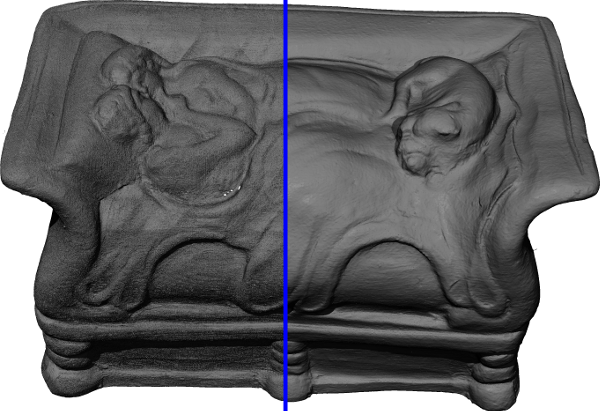
Figure : the Lovers of Bordeaux point cloud (15.8 million points). Exploiting self-similarity in the model