Ultrasound elastography: a 3D strain estimator for freehand acquisition
Aim of the study
Accurately estimating the strain is one of the fundamental challenges in ultrasound (US) quasi-static elastography. Yet, most of the techniques used in elastography remain bi-dimensional and may lead to noisy elastograms if significant out-of-plane motion occurs. Moreover, the recent development of 2D transducer arrays to acquire 3D US RF data provides new prospects for medical US applications and in particular for elastography. The aim of this study is therefore to develop a 3D technique, able to accurately estimate biological tissue strain during freehand scanning.
Model
The proposed method is based on a 3D deformation model of the tissues. It locally computes axial strains while considering lateral and elevational motions. Unlike most of other techniques that model the compression-induced local displacement as a simple translation, our model also locally considers an axial scaling factor in addition to a 3D shift. Therefore, the volume transformation is described by four parameters: an axial delay, an axial scaling factor, and a lateral and an elevational shift. The relation between pre- and post-compression volumes, denoted V1 and V2, respectively, can thus be locally formalized by the following relation:
[math]V_1(x,y,z)=V_2(\alpha.x+d,y+\tau,z+\nu)[/math]
where Vi(x,y,z) is the signal amplitude at the (x,y,z) position.
Method
To locally estimate the parameters in the whole US volume, 3D regions of study are selected and displaced. In the US volume V1, the pre-compression region of study R1 is regularly moved in the three directions, therefore covering a regular grid. On the other hand, the post-compression region of study R2 is moved according to the previously estimated displacements. Once R1 and R2 are selected, a joint estimation of the parameters is performed thanks to the minimization of an objective function f, based on the correlation coefficient between R1 and its deformed version R2 compensated for the parameters. The problem is formulated as a minimization process under constraints:
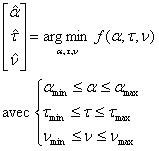
The optimization is processed thanks to a sequential quadratic programming methodology (Deprez et al.).
Application and results
1) An example with a CIRS phantom dedicated to elastographic studies is presented.
This phantom mimicking a human breast contains several inclusions that are stiffer than the background material and hardly detectable with ultrasound imaging.
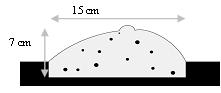
Figure 1: Scheme of the CIRS breast mimicking phantom.
US RF data are acquired during freehand scanning, using an Ultrasonix ultrasound scanner (Ultrasonix Medical Corporation, Canada) equipped with a probe allowing volume acquisitions.

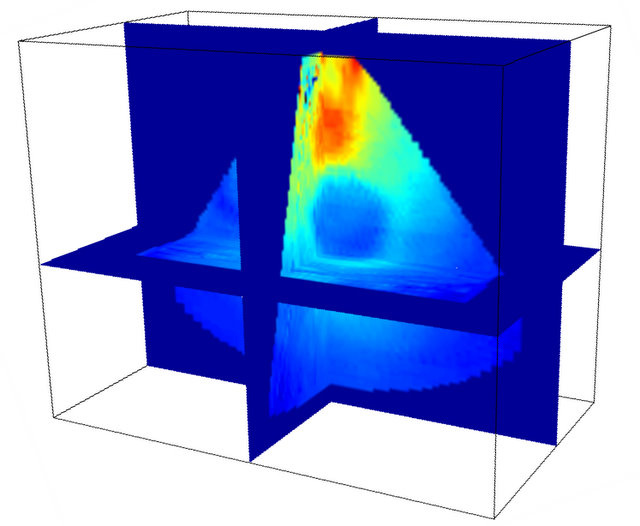
Estimated axial strain volume is shown in the following image. In spite of the free-hand acquisition, the whole volume is correctly estimated and the inclusion is clearly detected.
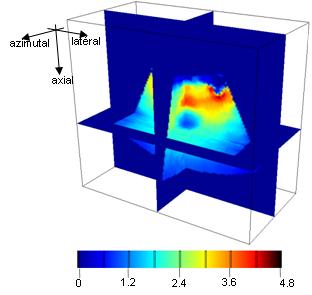
2) 2D versus 3D strain estimation
To demonstrate the interest of a 3D estimation, a comparison between a 2D and a 3D technique was led. Corresponding elastograms show the improvement provided by 3D estimation when out-of-plane motion becomes significant.